Back 2 Basics
Inspection
NDT
Ready for NDE 4.0
Robotic Computed Tomography
Besides the automation of a CT system for NDE 4.0, it is very important to digitize the whole process of NDE.
By Frank Herold
Computed tomography (CT) has become the standard method in nondestructive testing (NDT) or in the more quantitative approach nondestructive evaluation (NDE) when it comes to inspecting internal structures or measuring details especially quantitatively. Nowadays, CT is undergoing a transformation towards the newly established NDE 4.0.
NDE 4.0 is derived from Industry 4.0 (also known as Industry 4.0) a future project within the framework of the German government’s high-tech strategy to realize the ideas of the fourth industrial revolution. Following the automation of manufacturing processes in industry, the fourth industrial revolution is addressing digital connectivity and communication between manufacturing, but also quality assurance systems, i.e., NDT or NDE systems. Terms like smart factory or digital twin are related to this ongoing transformation.
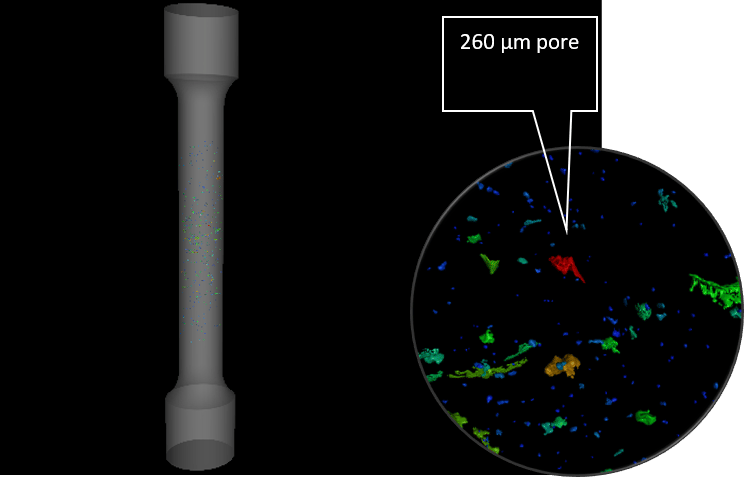
Pore analysis on a tensile test sample. Source: VisiConsult
Besides the automation of a CT system for NDE 4.0, it is very important to digitize the whole process of NDE. Based on the test specification and the associated guidelines and standards for the component to be tested, these must therefore be automatically transferred to and interpreted by the CT system. All the handling and manipulation of the component during the inspection process has to be done without any human interaction. Finally, the result of the evaluation has to be reported in a digital readable and interpretable format. This digital information can be used to synchronize the digital twin of the component with its current state. Of course, the CT system can also have a digital twin that enables the system to virtually plan ahead for the measurement task and, if necessary, even predict the expected results for various scenarios of influences on the component, for example.

One GUI is used for the real Robotic CT as well as its Digital Twin for trajectory planning, simulation and CT scanning. Source: VisiConsult
Robotic CT is well suited for NDE 4.0. Due to the high degree of freedom when using a robot as a manipulator of a CT system, it is possible to perform CT scans even for only a small part of the component, a so-called region of interest scan (ROI CT). This is useful for adapting the scan trajectory to an unknown component with its specifications on the fly. Also, instead of a classic rotational scan with the component moving around a rotational axis, the robot can run more sophisticated trajectories, such as a helical or even a spherical one. The latter requires a smaller number of projections than the other trajectories mentioned, since the projections for the CT scan contain more new information about the component when the projections are taken at equal spacing on a sphere around the component.
For the digital twin of Robotic CT, no other hardware than a standard workstation should be needed. This means that the states of the X-ray source, the robot as manipulator, the component and the digital detector array (DDA) are simulated by software. On the other side the control and analysis software, i.e., the graphical user interface (GUI), used with real system will stay the same. Thus, the operator will see no difference when interacting with the real system or with the digital twin. For simulation of the X-ray imaging chain, a simulation tool can be used, which allows for remotely creating realistic images from the software.
For controlling the robot, a general GUI control can be implemented using only the Cartesian coordinate system to adjust the three orthogonal translation directions and to define the pitch, roll and yaw abilities of the object. This interface is independently from the current manipulator, i.e., the user does not have to care about the real configuration of the joint values of the kinematics behind. Therefore, the same GUI can be also used for classical manipulators and encapsulates the special manipulation unit from the ideal world coordinates. This allows even non-robot specialists to control a Robotic CT system. With NDE 4.0, setting up the scan trajectory without human interaction is very simple, as the test regions can be specified in Cartesian coordinates only, regardless of the underlying test system with its unknown number of axes.
Using the robot to manipulate the test object, helical, spherical and even more sophisticated trajectories are possible enabling the imaging of specific ROIs. Source: VisiConsult
So far, only static CT scans have been discussed. However, since sequences of individual images form a movie, a sequence of individual reconstructed CT volumes also results in a movie in three dimensions, which is referred to as 4D CT. The small number of projections required for Robotic CT also makes it well equipped for fast acquisition times, which are the basis for 4D CT.
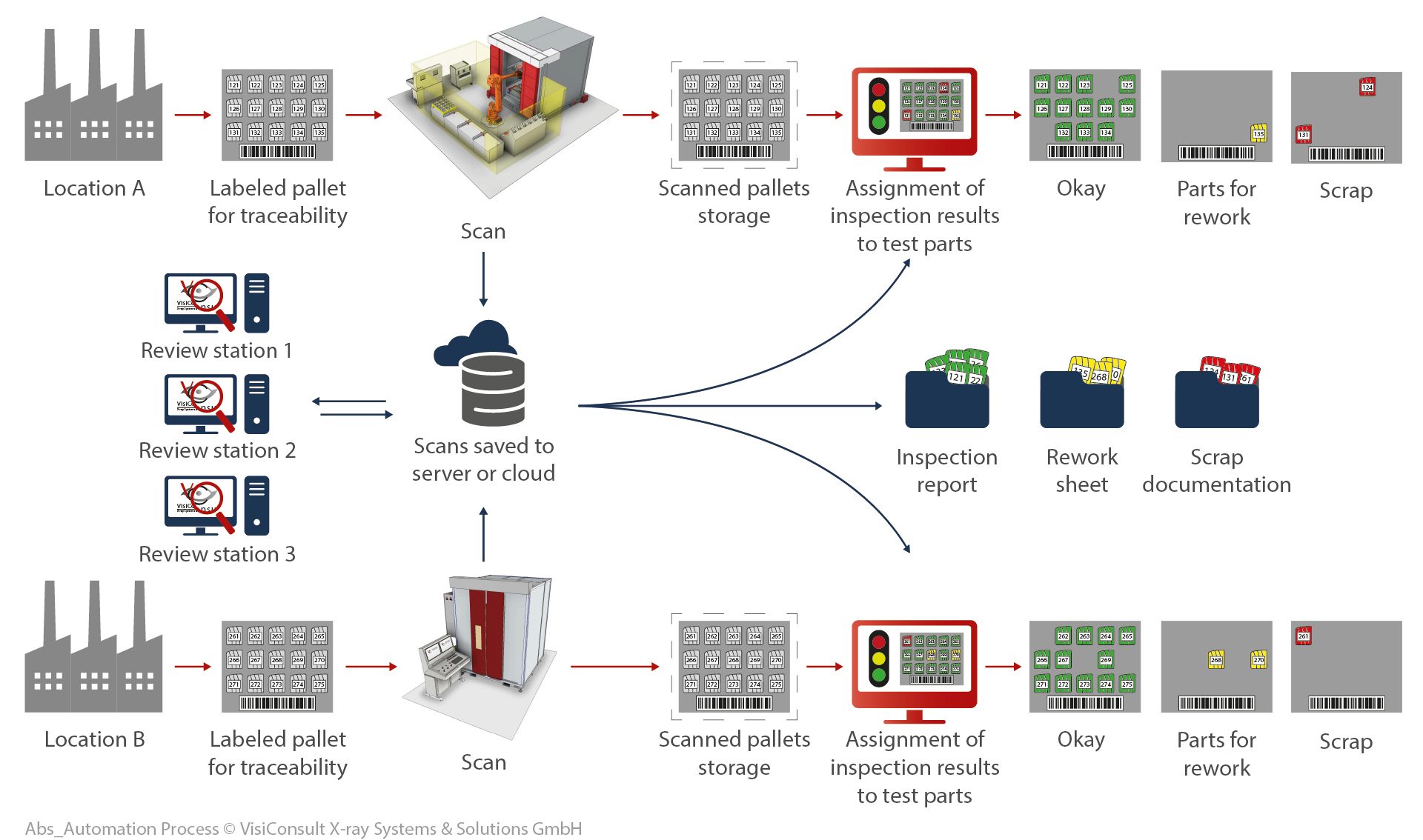
Scenario of a Smart Factory.
In the context of NDE 4.0 and the establishment of a smart factory, the idea of manufacturing components using additive manufacturing (AM) techniques is an obvious one.
Besides well-known defect types like pores, cracks and inclusions, AM often leads to typical irregularities such as delamination and lack-of-fusion pores. Lack-of-fusion pores occur when loose powder is not melted during the 3D printing process. This may happen when the power of the laser of the 3D printer was locally too low for some reason, e.g., if the laser diode has a failure or material spatter is present in the powder bed.
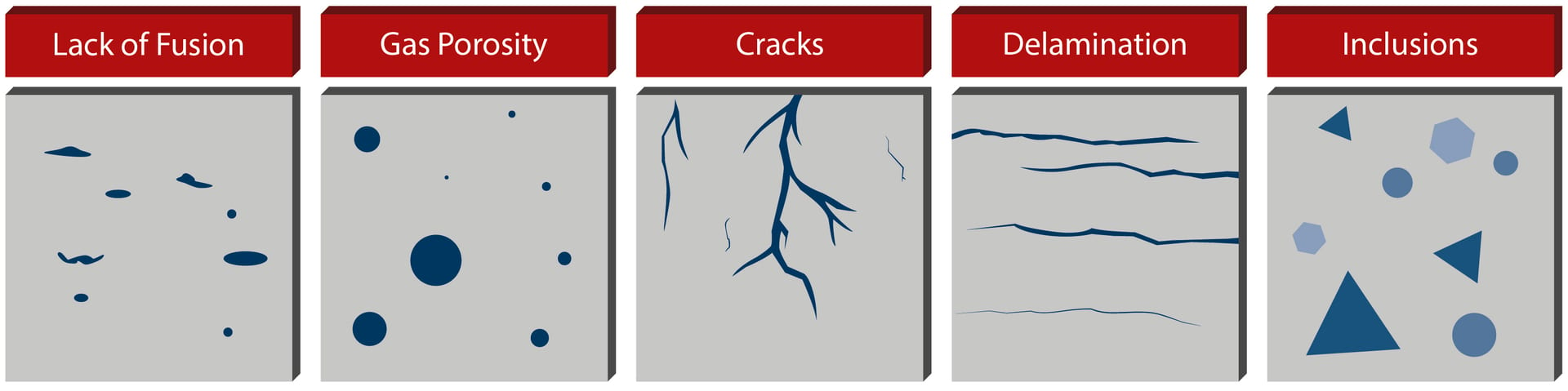
Typical types of irregularities of AM components. Source: VisiConsult
Generally, gas pores and inclusions are easily detected, whereas cracks and delamination are only found if they are penetrated in the same direction of their propagation. The lack-of-fusion pores are similar to flat or oval gas pores and therefore they also can be seen in their direction of the longer axis better than from the others, but due to the fact that they are filled by loose powder their contrast is very low and will become even lower the smaller they are. With Robotic CT, the scan trajectory can be adapted to the propagation direction easily.
In summary, Robotic CT is ready for NDE 4.0.
Image source: Source: VisiConsult, Getty Images
Ian R. Lazarus is president and CEO of Creato Performance Solutions, providing leadership development, training, and solutions to support operational excellence.
Frank Herold, research & technology expert, VisiConsult X-ray Systems & Solutions GmbH. For more information, call +49 451 2902860, email info@visiconsult.de or visit www.visiconsult.de or www.facebook.com/visiconsult.xray.
Jim L. Smith has more than 45 years of industry experience in operations, engineering, research & development and quality management.

August 2022 | Volume 61 | Number 8